Siłowniki specjalne to grupa siłowników, które wykonywane są na indywidualne zamówienie Klienta.
W przypadku siłowników niestandardowych Klient może dowolnie modyfikować wymiary, sposób mocowania, porty przyłączeniowe itp. Dodatkowo siłowniki z tej grupy mogą być wyposażone w:
Siłowniki mocowane są do obiektu za ucho stałe w dnie cylindra z osadzoną tuleją cylindryczną (mocowanie wahliwe). Takie rozwiązanie wymaga dokładnego prowadzenia końcówki tłoczyska w układzie kinematycznym obiektu, wykluczającego siły boczne w płaszczyźnie prostopadłej do płaszczyzny wahania siłownika.
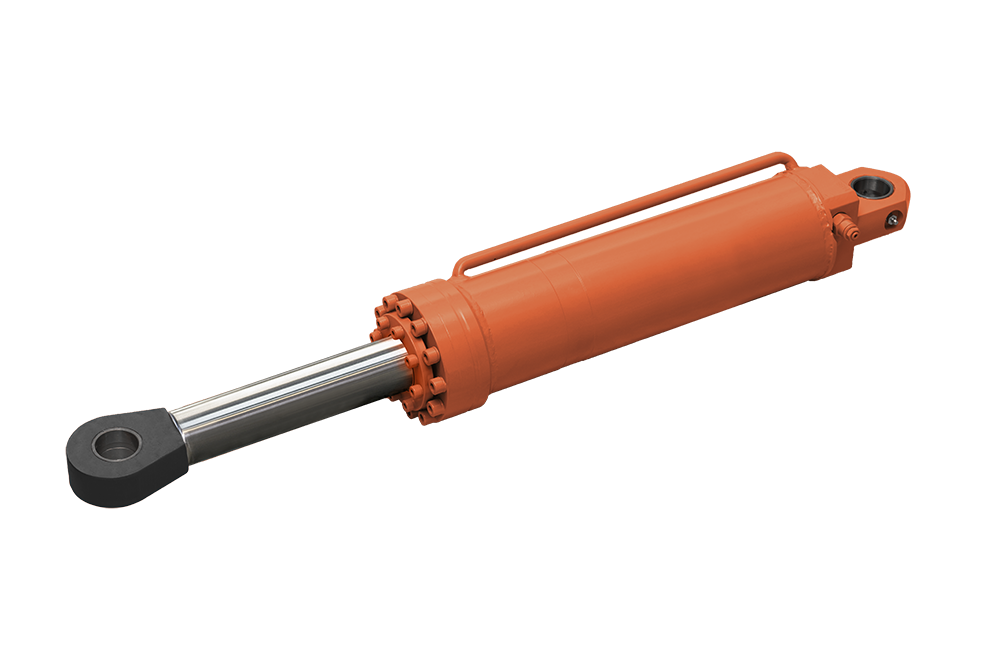
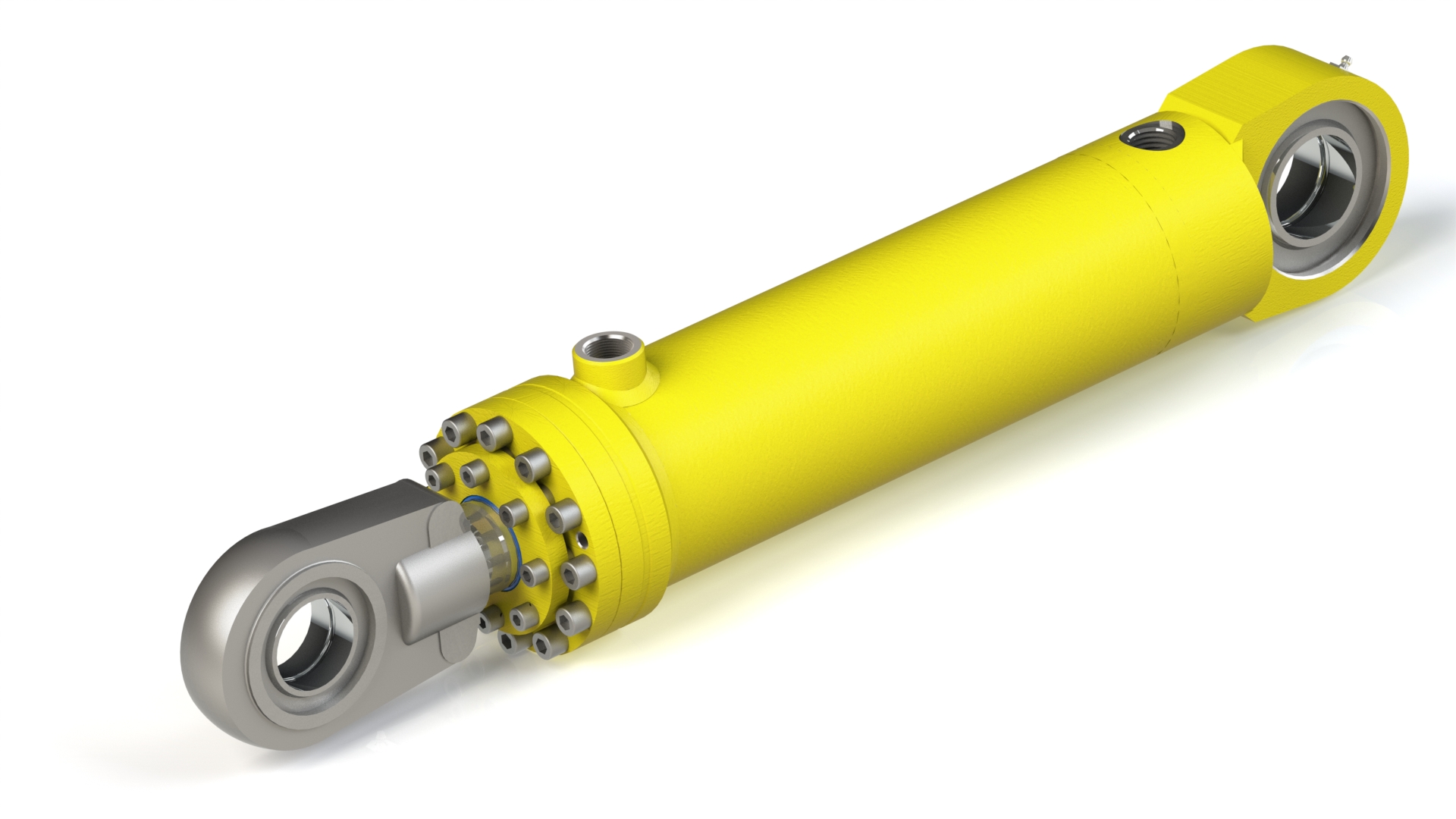
Siłowniki mocowane są do obiektu za ucho stałe w dnie cylindra z osadzonym łożyskiem ślizgowym przegubowym typu GE. Rozwiązanie takie umożliwia pewne niewielkie boczne odchylenia kątowe cylindra w czasie pracy. Dopuszczalne odchylenia podane są w kartach katalogowych łożysk.
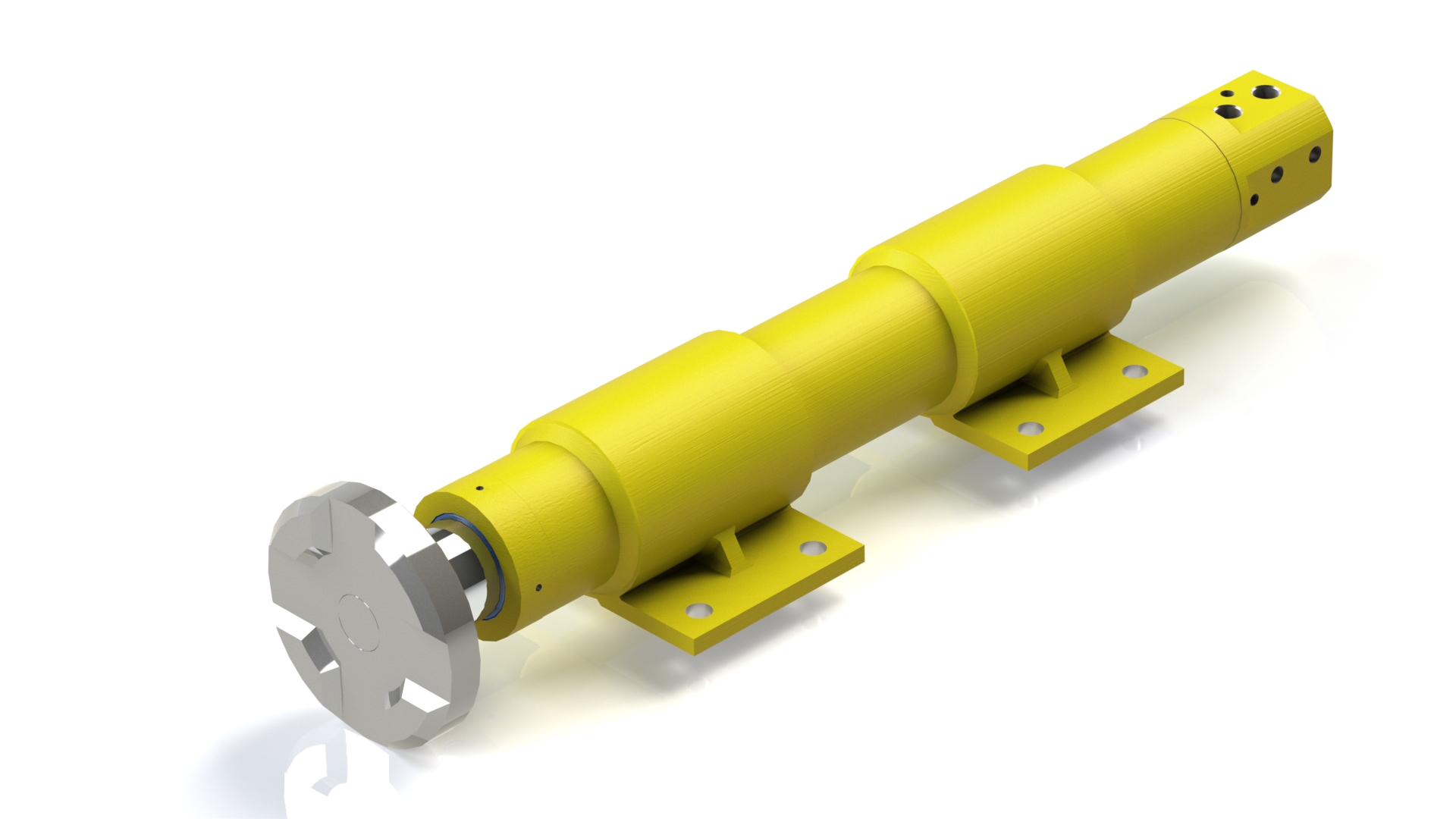
Siłowniki o mocowaniu wahliwym, na czopach bocznych. Stosunkowo szeroki rozstaw punktów mocowania cylindra (czopów bocznych) pozwala traktować taki cylinder jako element stabilizujący roboczy układ kinematyczny obiektu. Usytuowanie czopów bocznych bliżej tłoczyska powoduje zwiększenie wytrzymałości siłownika na wyboczenie bez potrzeby powiększania średnicy tłoczyska. Siłowniki tego typu z tłoczyskami zakończonymi uchem kutym lub spawanym przeznaczone są do pracy w szczególnie ciężkich warunkach pod względem wytrzymałościowym (obciążenia udarowe).
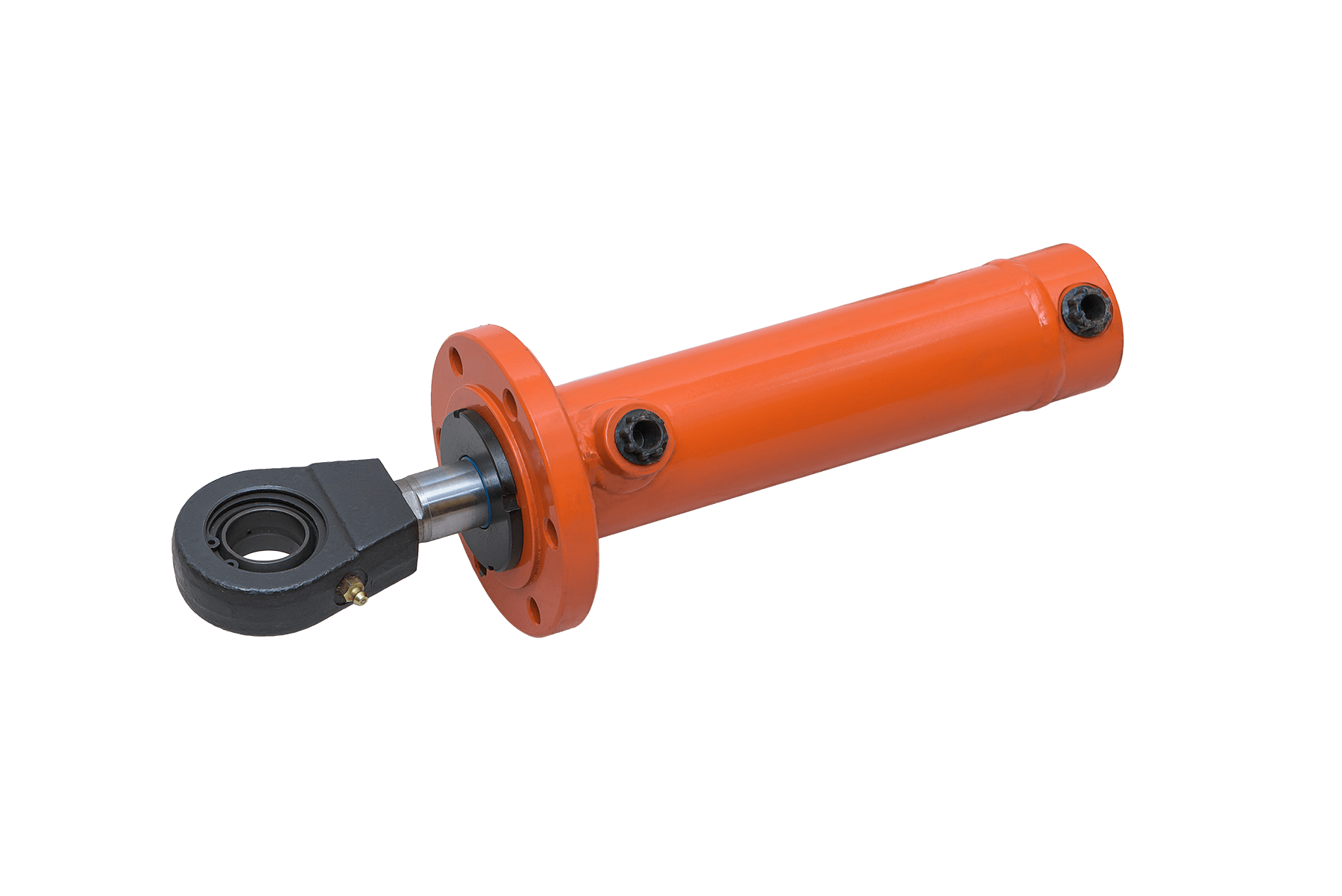
Siłowniki o kołnierzowym mocowaniu cylindra do obiektu. Jest to mocowanie sztywne (stały punkt mocowania cylindra do obiektu), zatem końcówka tłoczyska powinna być dokładnie prowadzona w układzie kinematycznym obiektu, aby wykluczyć siły boczne działające na tłoczysko. Zaleca się zastosowanie przegubowego mocowania końcówki tłoczyska w układzie kinematycznym obiektu (łożysko ślizgowe przegubowe).
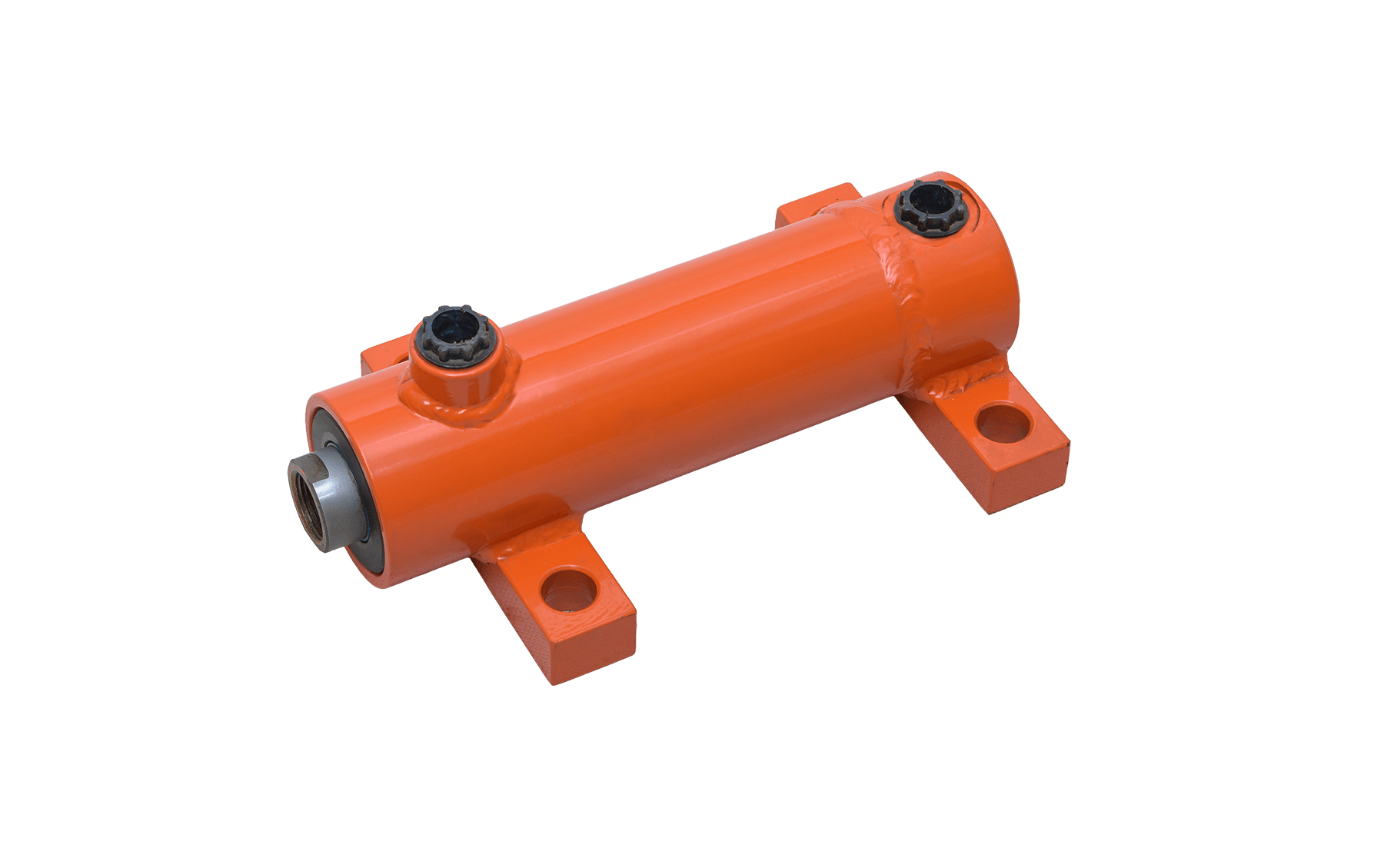
Siłowniki mocowane do obiektu za pomocą łap trwale połączonych z korpusem cylindra. Właściwości użytkowe tych cylindrów i wymagania z tym związane są podobne jak cylindrów SHJ5.
Siłowniki hydrauliczne specjalne – często nazywane niestandardowymi – wykonywane na specjalne zamówienie,
to grupa siłowników nieskatalogowanych ze względu na specyficzne warunki pracy, wymagające niestandardowych konfiguracji i modyfikacji.
Przykładami takiego wykonania siłownika mogą być:
Są to siłowniki kierowane pod specjalne wymagania i potrzeby klientów. Zamieszczone proste i czytelne schematy – w postaci rysunków technicznych z kilkoma naniesionymi parametrami – mają na celu ułatwić kierunek działania do dalszych prac związanych z dostosowaniem siłownika do potrzeb klienta.
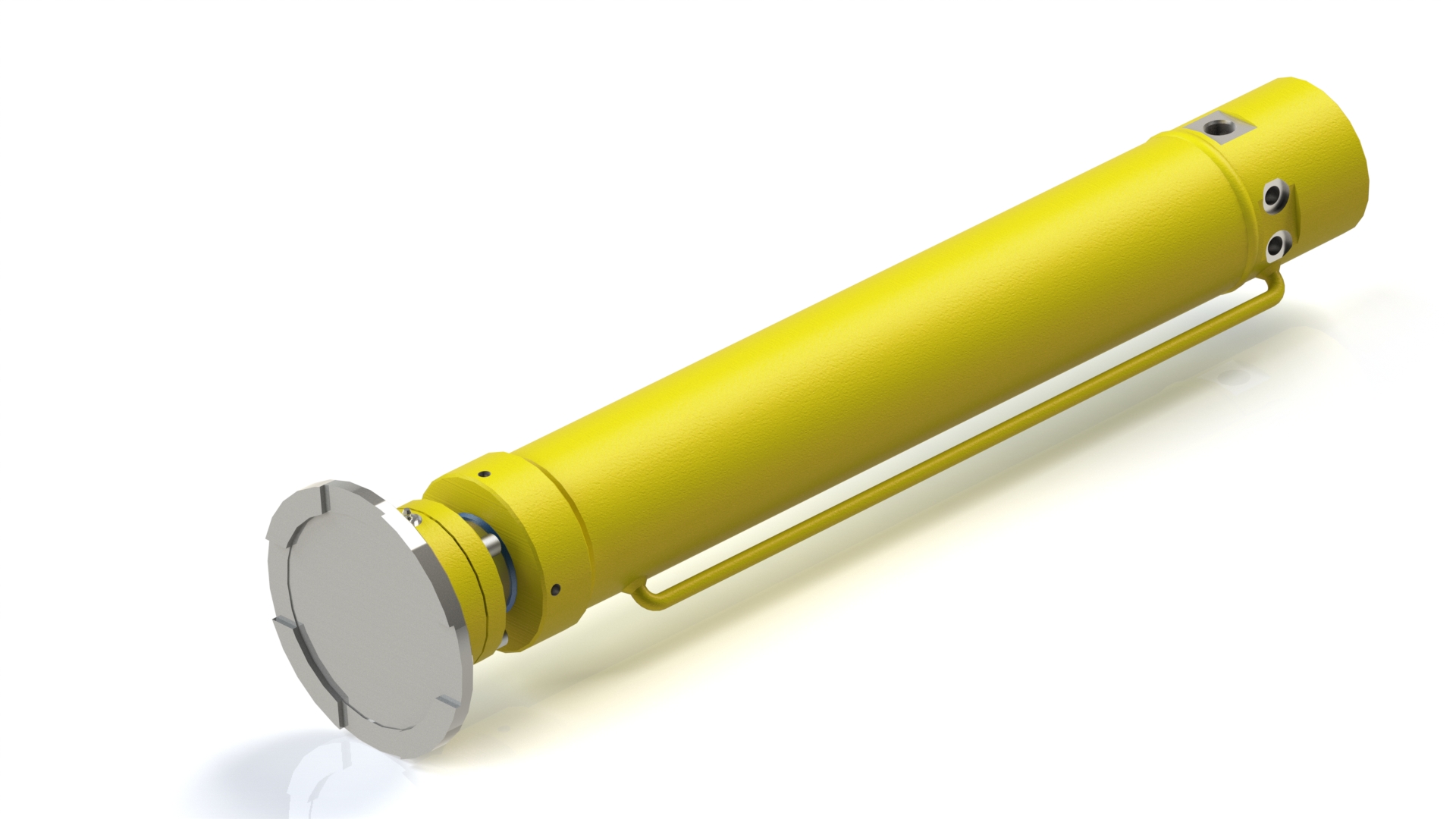
Cechą konstrukcyjną siłowników z tej grupy jest zastosowanie głowicy cylindra (dławnicy) przykręcanej wieńcem śrub (śruby z łbem walcowym z gniazdem sześciokątnym) do kołnierza przyspawanego do tulei cylindra. Siłowniki mają przegubowe mocowanie korpusu cylindra do obiektu w postaci łożyska ślizgowo przegubowego w uchu dna cylindra. Tłoczyska mogą być zakończone gwintem zewnętrznym, wewnętrznym, uchem kutym oraz przyspawanym pojedynczym lub podwójnym uchem widełkowym. Dodatkowo siłowniki mogą być wyposażone w metalowe osłony chroniące tłoczyska przed uderzeniami spadających odłamków skalnych.
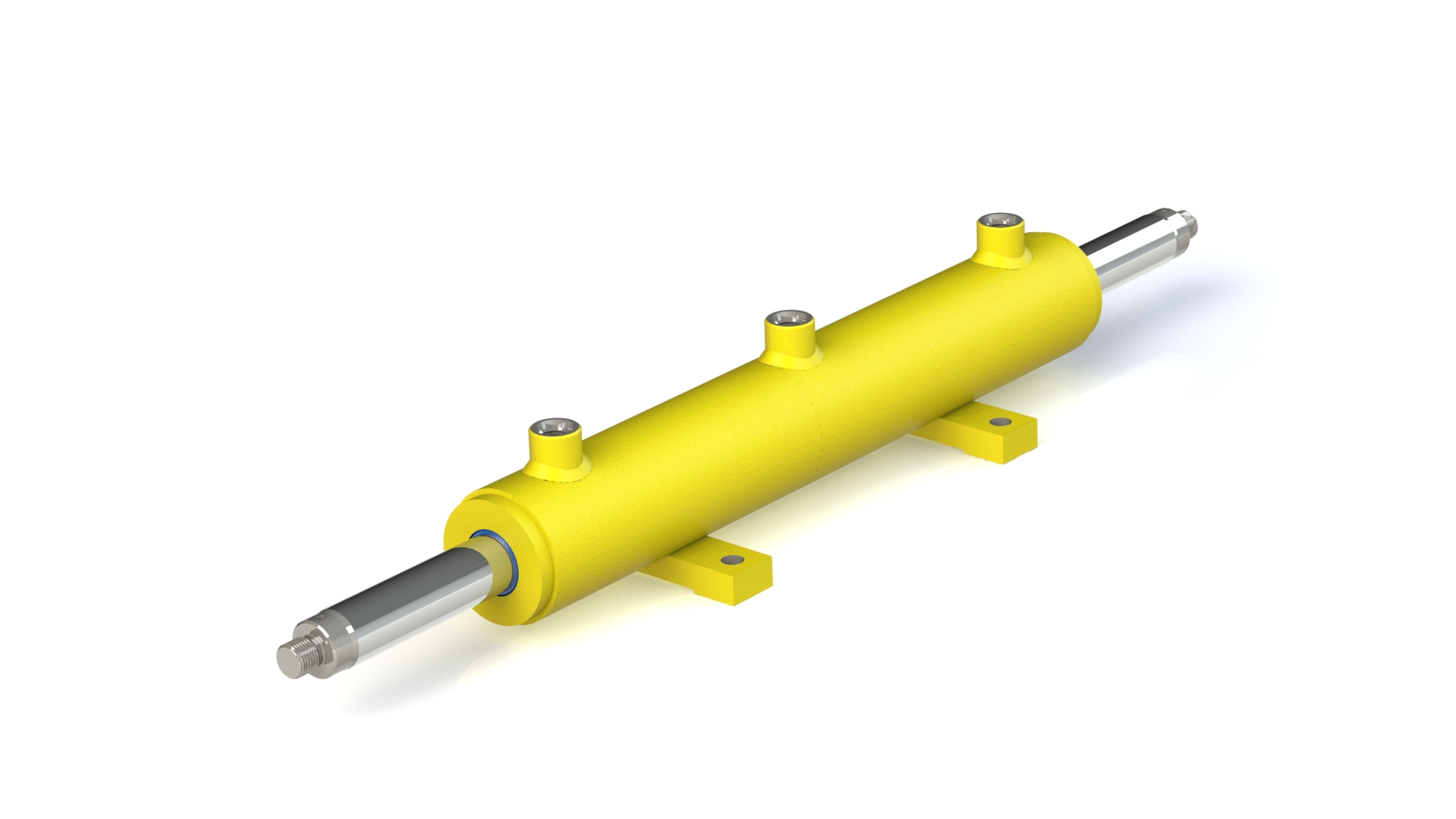
Siłowniki dwustronnego działania mocowane na łapach. Przeznaczone do samojezdnych i przewoźnych maszyn roboczych pracujących na postoju. Stosowane są w układzie stabilizacji maszyny, jako podpory nastawialne. Wbudowane zamki hydrauliczne unieruchamiają tłok z jednostronnym tłoczyskiem w dowolnym nastawionym położeniu.
Siłowniki dwustronnego działania mocowane na płaszczyźnie czołowej dna cylindra. Właściwości użytkowe tych cylindrów i wymagania z tym związane są podobne jak cylindrów SHP6. Różnica sprowadza się głównie do odmiennych sposobów mocowania cylindra do obiektu.
Siłowniki hydrauliczne teleskopowe mocowane na czopach bocznych. Cechą szczególną tych siłowników jest to, że składają się z kilku cylindrów o coraz mniejszej średnicy zmontowanych w jedną całość. Dzięki zastosowaniu teleskopowego wysuwania się kolejnych cylindrów uzyskuje się zwielokrotnienie zasięgu suwu roboczego. Siłownik tego typu dzielimy na siłowniki tłokowe jednostronnego działania (SHTJ) oraz siłowniki tłokowe dwustronnego działania (SHTD).
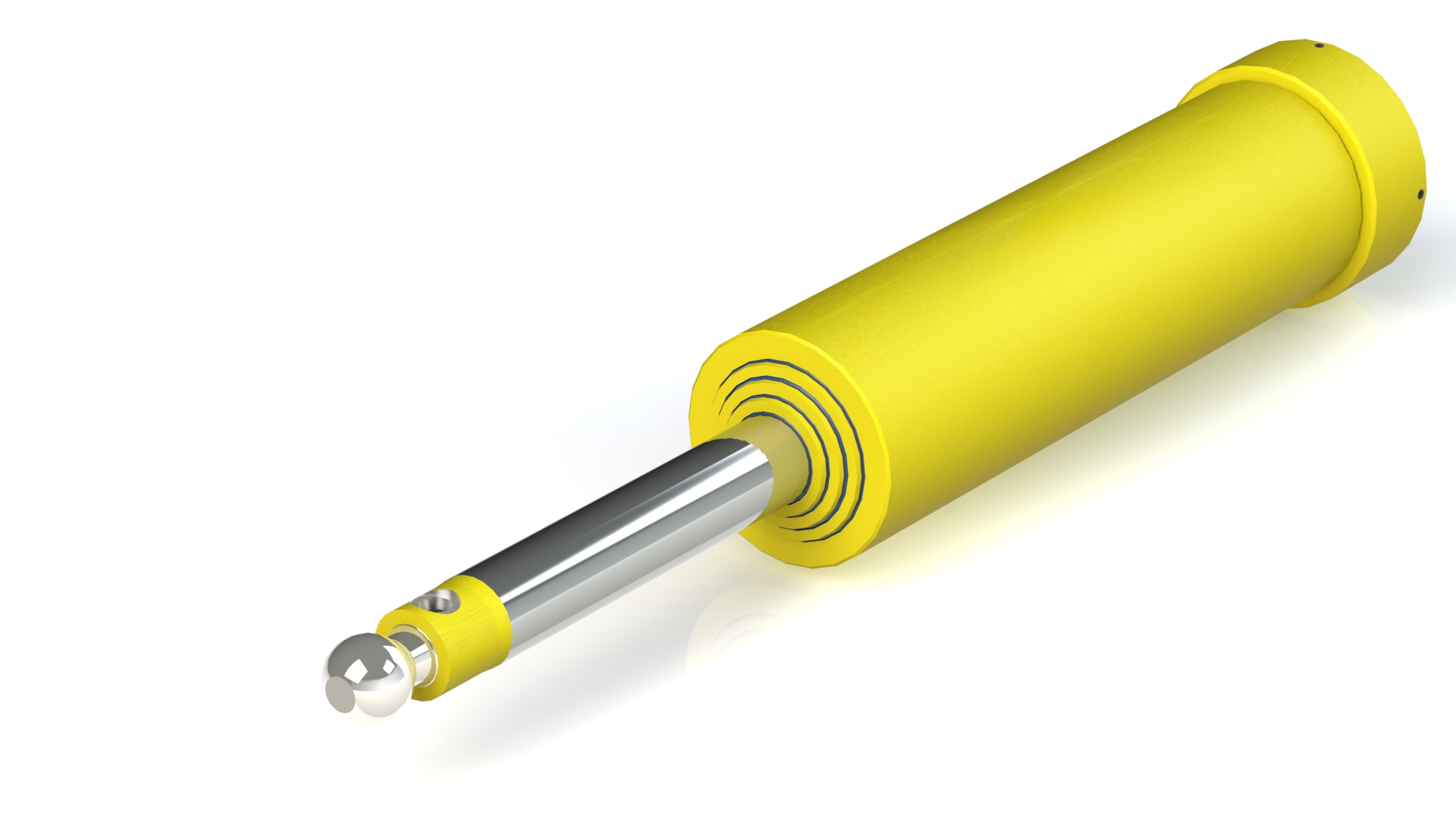
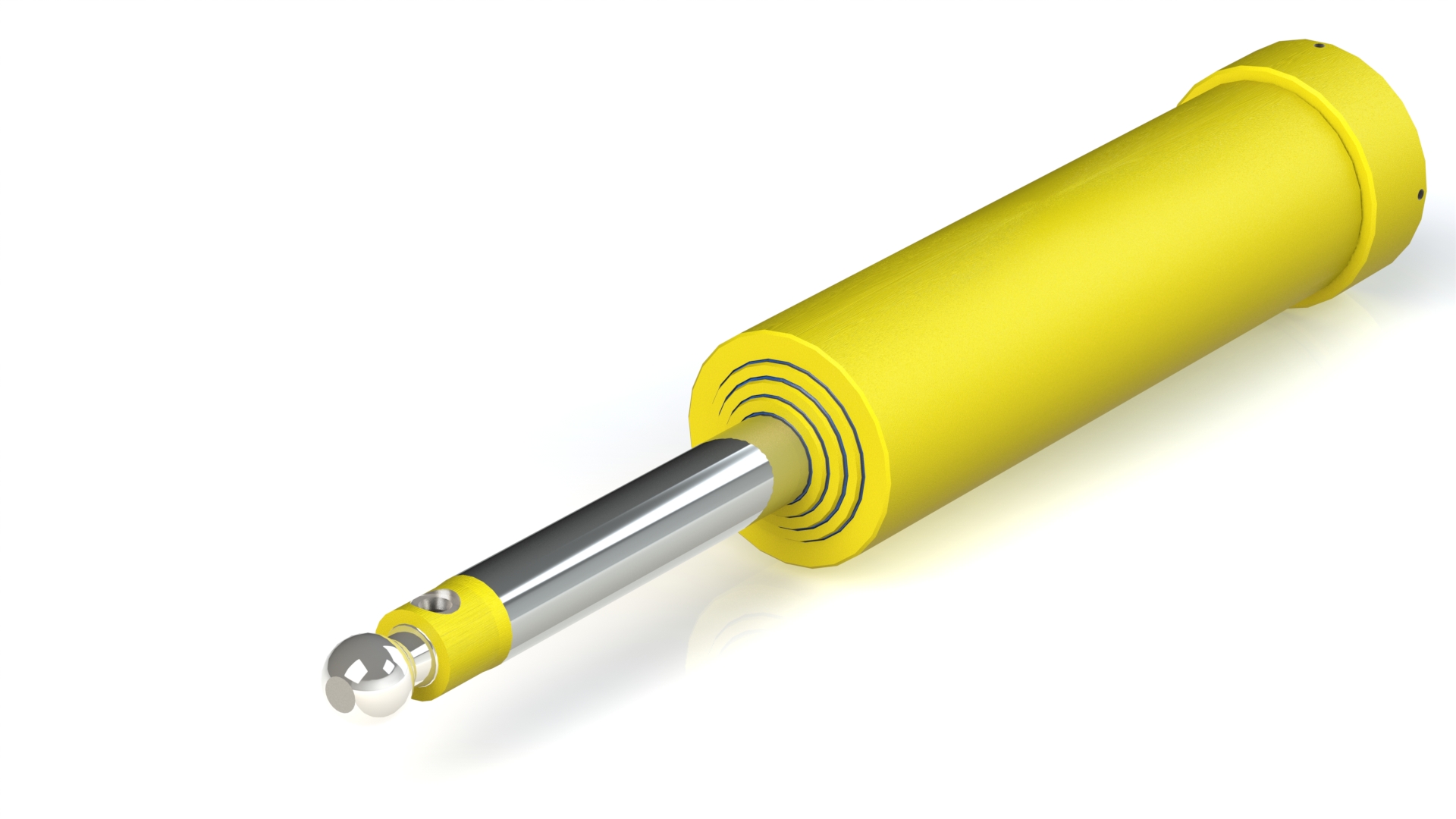
Siłowniki hydrauliczne teleskopowe jednostronnego działania mocowane na czopie kulistym w dnie cylindra. W siłownikach tego rodzaju, czynnik roboczy (np. olej hydrauliczny pod ciśnieniem) działa z jednej strony powodując wysuwanie poszczególnych członów siłownika. Ich powrót (zsuwanie/opadanie) realizowany jest pod wpływem siły zewnętrznej (najczęściej pod wpływem podnoszonego ciężaru).
Siłowniki hydrauliczne teleskopowe dwustronnego działania mocowane na czopie kulistym w dnie cylindra. W siłownikach tego rodzaju, ruch roboczy w obie strony (wysuw i powrót tłoczyska) odbywa się na skutek oddziaływania czynnika roboczego (np. olej hydrauliczny pod ciśnieniem ) naprzemiennie na obie powierzchnie tłoka.
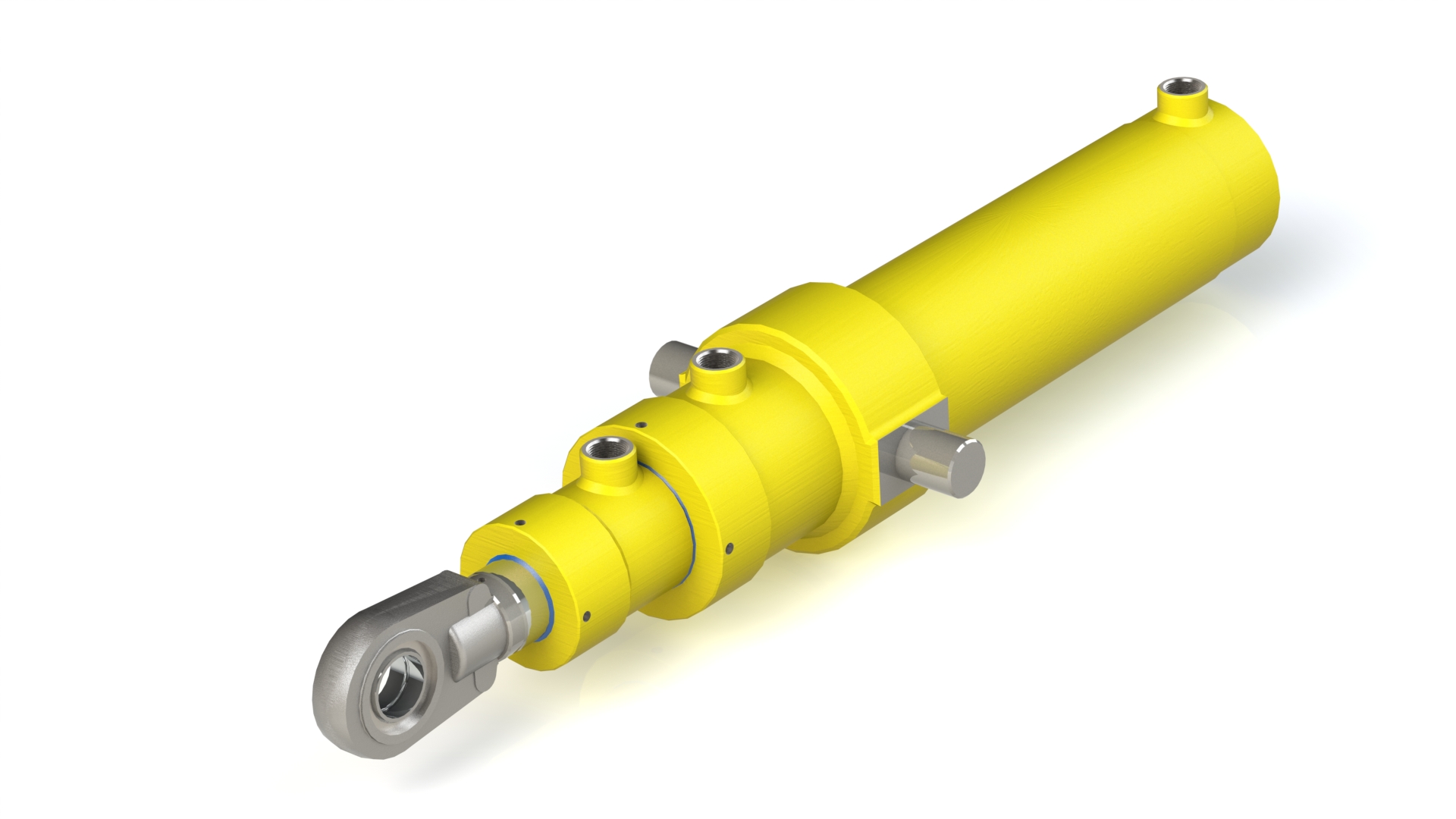
Siłowniki hydrauliczne dwustronnego działania. Mogą być mocowane za pomocą łap lub kołnierzy okrągłych trwale połączonych z korpusem cylindra. Tłoczyska mogą być zakończone gwintem zewnętrznym/wewnętrznym lub nakręcanym uchem z łożyskiem przegubowym. Właściwości użytkowe tych siłowników w zależności od wykonania polegają na wysuwaniu tłoczyska z jednej lub z drugiej strony cylindra, lub według potrzeb z obu stron jednocześnie.
Siłowniki tego typu dzielimy na:
SHD6 – siłowniki tłokowe dwustronnego działania z dwustronnym tłoczyskiem, w których wysuwające się tłoczysko z jednej strony cylindra powoduje chowanie się go z drugiej strony. Najczęściej stosowane są siłowniki o identycznej długości skoku po obu stronach tłoka, ale nie stanowi to reguły. Według potrzeb, siłownik posiadający taki sam skok po obu stronach tłoka może mieć niesymetryczne długości tłoczysk.
SHD6D – siłowniki tłokowe dwustronnego działania z dzielonym tłoczyskiem, w których wysuw tłoczyska odbywa się w obu kierunkach jednocześnie, natomiast ich powrót (wsuw) jest niezależny od siebie.